Applications of Particle Accelerators
By Prof. Rob Edgecock, STFC Rutherford Appleton Laboratory


Proof-of-principle: cheapest option!
Electron acceleration: 10 to 20 MeV
Built in DL
EMMA Accelerator at Daresbury Laboratory
http://en.wikipedia.org/wiki/EMMA_%28accelerator%29
The Electron Machine with Many Applications (EMMA) is a project at Daresbury Laboratory in the UK to build a linear non-scaling FFAG to accelerate electrons from 10 to 20 MeV. A FFAG (Fixed Field Alternating Gradient) is a type of accelerator in which the magnetic field in the bending magnets is constant during acceleration. This means the particle beam will move radially outwards as its momentum increases.
https://www.stfc.ac.uk/1321.aspx
Smaller, cheaper and/or better than current accelerators
• Four machines have been designed:
8 MeV for PET isotope production
14 MeV for SPECT isotope production
330 MeV for pCT
4.8 GeV for carbon therapy

Applications
There are more than 30000 accelerators in use world-wide:
44% for radiotherapy (for treating cancer)

http://www.nhs.uk/conditions/radiotherapy/Pages/Introduction.aspx
Radiation therapy or radiotherapy, often abbreviated RT, RTx, or XRT, is therapy using ionizing radiation, generally as part of cancer treatment to control or kill malignant cells.
http://en.wikipedia.org/wiki/Radiation_therapy
41% for ion implantation (making better semiconductors)
Ion implantation is a materials engineering process by which ions of a material are accelerated in an electrical field and impacted into a solid. This process is used to change the physical, chemical, or electrical properties of the solid. Ion implantation is used in semiconductor device fabrication and in metal finishing, as well as various applications in materials science research.

The image above left is an implantation setup with mass separator. The image above right is an ion implantation system at LAAS technological facility in Toulouse, France.
http://en.wikipedia.org/wiki/Ion_implantation
http://www.accelerators-for-society.org/industry/index.php?id=8
9% for industrial applications (“curing” materials; sterilisation; carbon dating; treating flue gases; treating water etc.)
Electron beam welding (EBW) uses a focused beam of electrons to fuse together two materials.

Space-Age Part Fabrication: A technique developed by NASA, called electron beam freeform fabrication (EBF3) creates small metal parts for spacecraft in a fully automated process involving an electron beam. Image credit: NASA.
Electron beam machining (EBM) is similar to EBW insofar as electrons are accelerated to high velocities and focused into a beam. The electron beam is then focused onto a metal, the electrons collide with the metal and the kinetic energy of the electrons is converted to heat.
In the production of shrink wrap, an electron beam is fired at the polyethylene: electrons collide with the polyethylene molecules causing the hydrogen-carbon bonds to break, leaving gaps in the polymer where new atoms can bond to the carbon atoms.

Shrink Wrap: Shrink wrap packaging is used to package many products and is a common sight in supermarkets, but did you know that particle accelerators play a vital role in its production. Image credit: Vicki & Chuck Rodgers/Flickr
Another method of cross-linking polymers is by using X-ray or gamma ray radiation. The decision to use either electron beam or X-ray/gamma-ray treatment is made depending on the type of polymer being cross-linked and the size of the object being treated.

Hardening materials: Replacing steel with X-ray cured carbon composites can reduce car energy consumption by 50%. Image credit: INFN/ Domenico Santonocito, Italy
For irradiation of food items, it is essential to select a dose high enough to kill or prevent the bacteria or insect from reproducing, and low enough that it does not damage the food. Many food products are treated using an electron beam: fruit and vegetables, cereals, spices, fish, fresh meats…

Many foods such as fruits and vegetables are treated using electron beams to help keep them fresher for longer. Image credit: World Bank Photo Collection/Flickr
http://www.accelerators-for-society.org/research/index.php?id=5
http://www.iwtc.info/2007_pdf/9-6.pdf
4% low energy research (structure of materials, microanalysis of materials, mass spectroscopy, PIXE, etc.)
Nuclear Physics research carried out at large particle accelerator facilities such as the Relativistic Heavy Ion Collider (RHIC) at the Brookhaven National Laboratory in New York or the Large Hadron Collider (LHC) at CERN in Geneva, carry out cutting edge research aimed at understanding how the interactions between fundamental particles in the nucleus result in the observable properties of the nucleus and how matter evolved into the composition of atomic elements that the world has today.

Photons and neutrons and even ions are essential tools used to study materials at the atomic level. In the example beside, scientists at ISIS used neutrons beams to uncover more about how the drug amphotericin works. Image credit: Dr DJ Barlow at Kings College London using ISIS Neutron facility, UK
One example of the use of synchrotron radiation is the development of superabsorbent polymers, made by material scientists using accelerator generated X-rays, that are used to make more absorbent nappies to keep babies dry.

Image credit: TIARA
Article [2011] (Symmetry Magazine): Accelerators help keep baby dry
Improving the quality of chocolate. Researchers at the European Synchrotron Radiation Facility (ESRF) have studied the structure of chocolate using radiation generated by a particle accelerator, passing their findings onto chocolate manufactures to help them improve their product.
Article [2011] (Symmetry Magazine): Chocolat à la particle accelerator

Image credit: Creative Commons 2.0 (by-ND)
Neutrons are highly suitable for probing materials. Their properties allow them to penetrate deep into materials without destroying the material itself. The way in which neutrons scatter off the nuclei in gases, liquids and solids tells us about the structure of the material.
Crystallography, much like microscopy, uses electromagnetic radiation to view small objects. Where optical microscopy uses visible light, crystallography uses shorter wavelength radiation such as X-rays from synchrotron light sources or neutrons from spallation sources.
X-rays produced by synchrotron light sources have been used by biological researchers to shed light on various topics such as the structure of protein and the function of the brain, as well as many others.

Protein modelling: Synchrotron light allows scientists to solve the 3D structure of proteins e.g. the Chikungunya virus. Image credit: Voss et al., Nature (2010) 468, 709 (via Synchrotron Soleil, France)
Techniques such as X-ray crystallography, which use X-rays generated by particle accelerators, can be used in the development of new drugs. A recent highly effective drug developed this way at SLAC National Accelerator Laboratory in the US was highly successful in treating malignant melanoma.
http://en.wikipedia.org/wiki/Accelerator_mass_spectrometry
AMS is performed by converting the atoms in the sample into a beam of fast moving ions (charged atoms). The mass of these ions is then measured by the application of magnetic and electric fields
Accelerator mass spectrometry (AMS) differs from other forms of mass spectrometry in that it accelerates ions to extraordinarily high kinetic energies before mass analysis. The special strength of AMS among the mass spectrometric methods is its power to separate a rare isotope from an abundant neighbouring mass (“abundance sensitivity”, e.g. 14C from 12C).

Accelerator mass spectrometer at Lawrence Livermore National Laboratory
https://www.physics.purdue.edu/ams/introduction/ams.html

http://c14.arch.ox.ac.uk/embed.php?File=ams.html
http://en.wikipedia.org/wiki/Particle-induced_X-ray_emission
Particle-induced X-ray emission or proton-induced X-ray emission (PIXE) is a technique used in the determining of the elemental make-up of a material or sample. When a material is exposed to an ion beam, atomic interactions occur that give off EM radiation of wavelengths in the x-ray part of the electromagnetic spectrum specific to an element. PIXE is a powerful yet non-destructive elemental analysis technique now used routinely by geologists, archaeologists, art conservators and others to help answer questions of provenance, dating and authenticity.

http://www.spirit-ion.eu/Techniques/PIXE-PIGE.html
http://www.ifj.edu.pl/dept/no5/nz52/nz2s/wmk/pixe.htm
1% medical isotope production (For PET and SPECT medical imaging, etc.)
A particle accelerator is used to produce isotopes by accelerating protons or other ions to close to the speed of light and smashing them into atoms to initiate a nuclear reaction, in which radioactive isotopes are produced.

Manmade Isotopes: Artificial isotopes made using accelerators play an important role in both medical imaging and radio therapy – Image credit: TRIUMF
http://www.accelerators-for-society.org/health/index.php?id=7
http://www.triumf.ca/isotope-production
http://csis.org/files/publication/130807_Hoedl.pdf
https://www.isotopes.gov/outreach/reports/Medical_Isotope_Production_Use.pdf
https://indico.cern.ch/event/215087/contribution/7/material/slides/1.pdf
http://podcasts.ox.ac.uk/gsearch/investigate%20structure%20materials%20accelerator%20physicist
<1% research
Applications of generators generate $0.5T dollars per year.
Introduction to Cancer
Cancer starts with mutations of a single cell and typically 6 are required to make it cancerous.
Mutations accumulate over time and can occur by accident; however they usually require a “carcinogen”. Tobacco (which contains 50), car fumes, the sun, many chemicals, radiation etc. etc. are all carcinogens.

http://en.wikipedia.org/wiki/Neoplasm
Neoplasm is an abnormal growth of tissue, and when also forming a mass is commonly referred to as a tumour. This abnormal growth (neoplasia) usually, but not always, forms a mass.
Some Statistics
Relative survival of adults* diagnosed with cancer in England and Wales, 1971-2001**

*15-99 years
**Coleman M (2007) 2020 goals launch
There are more than 300k new cases of cancer year in the UK
• 1 in 3 people will suffer from it
• 1 in 4 deaths result from it
Treatments
Cancer therapy is all about minimising collateral damage! You want to kill or remove just cancerous cells without damaging to healthy cells which could lead to side-effects.
Three main types of treatment: surgery, radiotherapy and chemotherapy and these are usually combined.
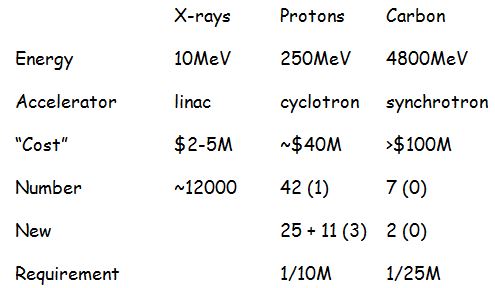
Radiotherapy Uses beams of ionising radiation e.g. X-rays, electrons, protons, light ions. These are usually produced externally and directed onto tumour.
Radiotherapy

Ionisation from radiation kills cells in two ways and multiple DNA chain breaks is the preferred option.
“Standard” radiotherapy uses X-rays which are created using electron linear accelerator with and energy range of about 6 to 20 MeV.

X-rays are produced in a metal foil

• Typical treatment: ~60Gy
• Delivered in “fractions” of ~2Gy
http://en.wikipedia.org/wiki/Gray_(unit)
The gray (symbol: Gy) is a derived unit of ionizing radiation dose in the International System of Units (SI). It is defined as the absorption of one joule of radiation energy by one kilogram of matter,
http://www.bir.org.uk/patients-public/radiotherapy/
http://www.royalmarsden.nhs.uk/gp/factfiles/pages/radiotherapy-techniques.aspx
http://en.wikipedia.org/wiki/External_beam_radiotherapy
External beam radiotherapy (EBRT) or teletherapy is the most common form of radiotherapy. The patient sits or lies on a couch and an external source of radiation is pointed at a particular part of the body.
It directs the radiation at the tumour from outside the body. Kilovoltage (“superficial”) X-rays are used for treating skin cancer and superficial structures. Megavoltage (“deep”) X-rays are used to treat deep-seated tumours (e.g. bladder, bowel, prostate, lung, or brain).
While X-ray and electron beams are by far the most widely used sources for external beam radiotherapy, a small number of centres operate experimental and pilot programs employing heavier particle beams, particularly proton sources.
Intensity modulated radiotherapy (IMRT) is a type of conformal radiotherapy. Conformal radiotherapy shapes the radiation beams to closely fit the area of the cancer.
It is an advanced mode of high-precision radiotherapy that uses computer-controlled linear accelerators to deliver precise radiation doses to a malignant tumour or specific areas within the tumour. IMRT allows for the radiation dose to conform more precisely to the three-dimensional (3-D) shape of the tumour by modulating—or controlling—the intensity of the radiation beam in multiple small volumes. IMRT also allows higher radiation doses to be focused to regions within the tumour while minimizing the dose to surrounding normal critical structures. Treatment is carefully planned by using 3-D computed tomography (CT) or magnetic resonance (MRI) images of the patient in conjunction with computerized dose calculations to determine the dose intensity pattern that will best conform to the tumour shape. Typically, combinations of multiple intensity-modulated fields coming from different beam directions produce a custom tailored radiation dose that maximizes tumour dose while also minimizing the dose to adjacent normal tissues.
http://www.radiologyinfo.org/en/info.cfm?pg=imrt

The above left photograph shows a multileaf collimator used in linear accelerators to shape the beams and to deliver intensity modulated radiotherapy (IMRT). The above right image shows the treatment planning.
http://www.simballc.org/imrt.html
Dose Localisation
http://en.wikipedia.org/wiki/Bragg_peak
The Bragg peak is a pronounced peak on the Bragg curve which plots the energy loss of ionizing radiation during its travel through matter. For protons, αlpha-rays, and other ion rays, the peak occurs immediately before the particles come to rest. This is called Bragg peak, for William Henry Bragg who discovered it in 1903.
The image below shows the dose produced by a native and by a modified proton beam in passing through tissue, compared to the absorption of a photon or x-ray beam.

In an ideal world you want the Bragg peak to correspond to the position of the tumour. However X-rays do not have this convenient Bragg peak.

Healthy cells do have more repair mechanisms.
To improve matters very sophisticated techniques are used to deliver therapy. These include fractionating the dose (spreading the does over time) allowing normal cells time to recover (tumour cells are generally less efficient in repair between fractions), use of IMRT and IGRT etc.
http://en.wikipedia.org/wiki/Image-guided_radiation_therapy
Image-guided radiation therapy (IGRT) is the process of frequent two and three-dimensional imaging, during a course of radiation treatment, used to direct radiation therapy utilizing the imaging coordinates of the actual radiation treatment plan.
It is possible to do better!
http://en.wikipedia.org/wiki/Proton_therapy

http://en.wikipedia.org/wiki/Proton_therapy
Proton therapy or proton beam therapy is a medical procedure, a type of particle therapy that uses a beam of protons to irradiate diseased tissue, most often in the treatment of cancer. Proton therapy’s chief advantage over other types of external beam radiotherapy is that it can more precisely localize the radiation dose.
A 2009 systematic review found that “No comparative study reported statistically significant or important differences in overall or cancer-specific survival or in total serious adverse events.”
Due to their relatively large mass, protons have little lateral side scatter in the tissue; the beam does not broaden much, stays focused on the tumour shape and delivers only low-dose side-effects to surrounding tissue. All protons of a given energy have a certain range; very few protons penetrate beyond that distance. Furthermore, the dose delivered to tissue is maximum just over the last few millimetres of the particle’s rang (the Bragg peak).
In most treatments, protons of different energies with Bragg peaks at different depths are applied to treat the entire tumour. These Bragg peaks are shown as thin blue lines in the figure to the right. The total radiation dosage of the protons is called the spread-out Bragg peak (SOBP), shown as a heavy dashed blue line in figure below. It is important to understand that, while tissues behind or deeper than the tumour receive no radiation from proton therapy, the tissues in front of or shallower than the tumour receive radiation dosage based on the SOBP.
In a typical treatment plan for proton therapy, the spread out Bragg peak (SOBP, dashed blue line in the image below) is the therapeutic radiation distribution. The SOBP is the sum of several individual Bragg peaks (thin blue lines) at staggered depths. The depth-dose plot of an X-ray beam (red line) is provided for comparison. The pink area represents additional doses of X-ray radiotherapy—which can damage normal tissues and cause secondary cancers, especially of the skin.

Probability of secondary tumours
Radiotherapy 55%
IMRT 31%
Proton therapy 5.1%
IMPT 4.4%
http://en.wikipedia.org/wiki/Medulloblastoma
Medulloblastoma is the most common and highly malignant brain tumour in children. It originates in the part of the brain that is towards the back and the bottom, on the floor of the skull, in the cerebellum or posterior fossa. Research has shown that there are actually four subtypes.

The top part of the above image shows that X-ray therapy results in a greater area being affected by the treatment. The bottom part of the image shows that proton therapy can be made more localised.

http://www.carboniontherapy.org/
http://www.slideshare.net/fovak/heidelberg-ion-therapy-center
Carbon ions have a unique therapeutic promise. They are sometimes able to eradicate tumours that have become resistant to all other forms of radiation.
While protons may only damage one strand of DNA in a tumour cell, eventually causing its death, carbon ions cripple both strands in the double helix. Thus the heavier carbon ions make a more potent beam and have a better chance to kill cells traditional methods haven’t been able to.
http://www.symmetrymagazine.org/breaking/2011/12/14/kicking-cancer-with-carbon-ions
http://www.ro-journal.com/content/9/1/88
Charged Particle Therapy
This looks to have advantages over X-rays. Why don’t we hear more about it?
http://www.ptcri.ox.ac.uk/about/
http://www.ptcri.ox.ac.uk/about/literaturereview.shtml
http://www.nature.com/news/2009/090107/full/457139a.html

Particle-beam therapy can target cancers that are resistant to X-rays. SIEMEN
http://www.symmetrymagazine.org/article/december-2008/the-power-of-proton-therapy

The cyclotron uses electric fields to accelerate protons to two-thirds the speed of light.
The electromagnets focus the proton beams towards the gantry.
The gantry can rotate 360 degrees around the patient to position the nozzle.
A powerful magnet guides the beam to the patient through the nozzle.
Credits: The New York Times and University of Florida Proton Therapy Institute
The UK situation

http://www.clatterbridgecc.nhs.uk/professionals/physicsdepartment/cyclotron/
Proton therapy has been provided at the Douglas Cyclotron for the past twenty years for the treatment of ocular melanomas.

In 2013 the British government announced that £250 million had been budgeted to establish two centres for advanced radiotherapy, to open in 2018 at the Christie Hospital NHS Foundation Trust in Manchester and University College London Hospitals NHS Foundation Trust. These would offer high-energy proton therapy, currently unavailable in the UK, as well as other types of advanced radiotherapy including intensity modulated radiotherapy (IMRT) and image guided radiotherapy (IGRT).
Three centres for proton therapy are planned for Cardiff, London and Northumberland.
They will offer proton beam therapy to private and NHS cancer patients
It is hoped that the first centre in Cardiff will be up and running by 2016
Contributions from Particle Physics
• Accelerators are used for many things
• There are a lot of them about
• (Almost) everything covered by physics!
• Most accelerator types invented for Particle Physics
• Technology largely driven by Particle Physics
• Much interest in use for applications
• Significant recent improvements to cancer therapy
• Many projects World-wide
• An example:
Unique type of accelerator
Mixture between a cyclotron and synchrotron
• Technology from Particle Physics being transferred
• Radiotherapy very important
There are still problems and improvements to be made in standard radiotherapy and charged particle therapy.
• Possible to make better:
New particles
Better accelerators
Better techniques for imaging and dosimetry
Many of the problems are being addressed using PP technology.
